經(jīng)典場追跡仿真引擎,提供多樣化選項以使用最合適的方法處理衍射效應(yīng)��。 我們已經(jīng): 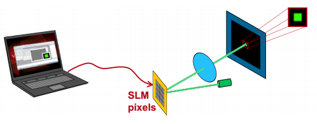
1. 為反射空間光調(diào)制器(SLM)生成一個優(yōu)化后的位相調(diào)制分布設(shè)計 2. 在最終系統(tǒng)的設(shè)置中對仿真結(jié)果進行分析����。 分步操作說明 通用方法用于設(shè)置一個SLM系統(tǒng)并完成設(shè)計,優(yōu)化和分析 1. 設(shè)計及分析過程 
2. D1:給定因子—根據(jù)SLM的幾何尺寸 由于SLM像素的固定尺寸����,結(jié)果輸出場的最大延展是確定的�����。利用公式可計算該延展�。 通過VirtualLab的衍射光束形狀會話編輯器可以自動進行壓縮��。 SLM的整體尺寸也是固定的。因此可直接獲得的輸出場分辨率并可通過第二個公式進行計算����。 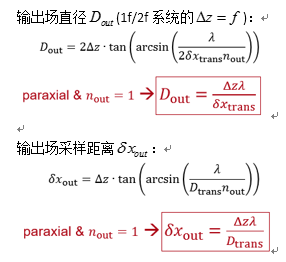

3. D1:可實現(xiàn)輸出場參數(shù) 考慮給定的SLM 總輸出場尺寸: 
在目標平面上沿x和y方向可獲得分辨率: 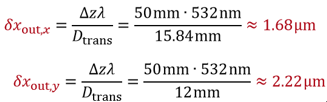
4. D2:輸入場 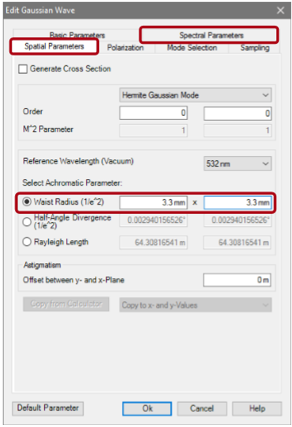
可使用VirtualLab的光源模型生成入射場。 我們從光源工作區(qū)中使用高斯光波模型生成指定入射的激光光束分布 - 在光譜標簽下指定波長- 在空間參數(shù)標簽下指定1/e2束腰半徑 5. D2:輸出場 可使用VirtualLab的光源模型生成輸出場�����。 我們從光源工作區(qū)中使用超高斯模型定義期望的目標光場分布 - 在光譜標簽下指定波長 - 在空間參數(shù)標簽下指定: 可分離(Rect.-Symm) 1/e2束腰半徑 邊緣寬度(應(yīng)大于無光束整形元件光學(xué)系統(tǒng)生成的單目標光斑半徑) 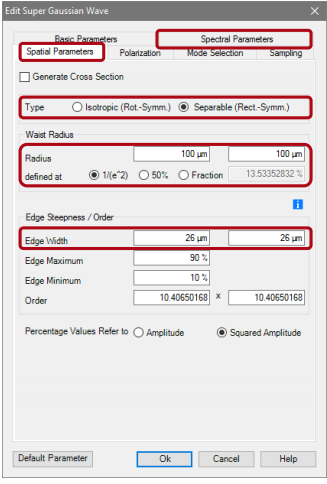
6. D3:入射角 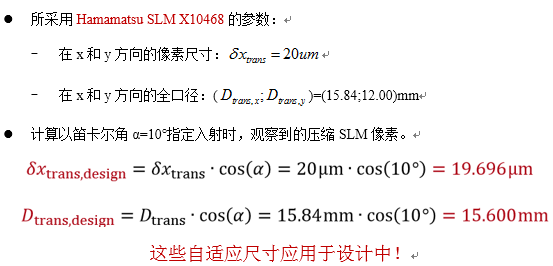
這些自適應(yīng)尺寸應(yīng)用于設(shè)計中�����! 7. 用于IFTA設(shè)計操作的系統(tǒng)概覽 8. D4:配置會話編輯器 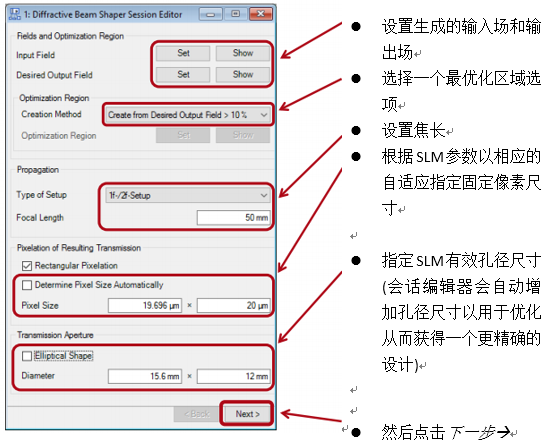
9. D4:通過參數(shù)概覽進行檢查 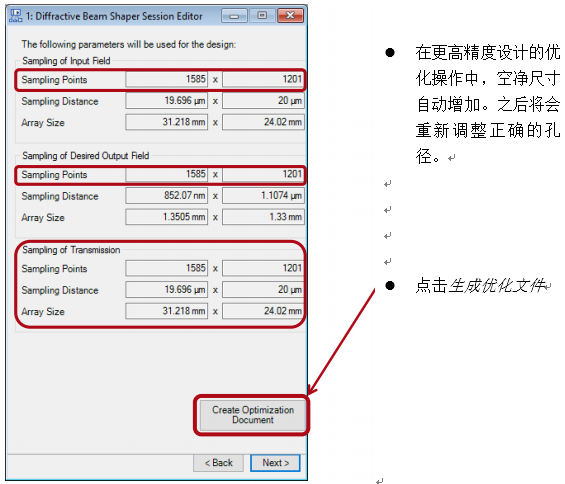
10. D5:幾何預(yù)設(shè)計 1. 為迭代傅里葉變換算法(IFTA)獲得一個好的起始點��,執(zhí)行基于幾何光學(xué)光束整形的預(yù)設(shè)計���。 2. 選擇笛卡兒可分性以生成一個矩形目標圖案。 3. 開始初始設(shè)計 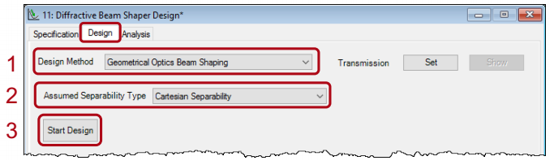
11. D5:IFTA-相位級次數(shù) 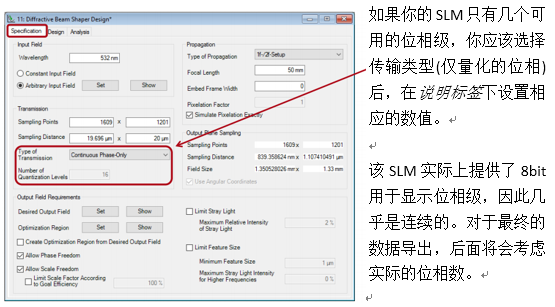
12. D5:IFTA—補償Sinc調(diào)制 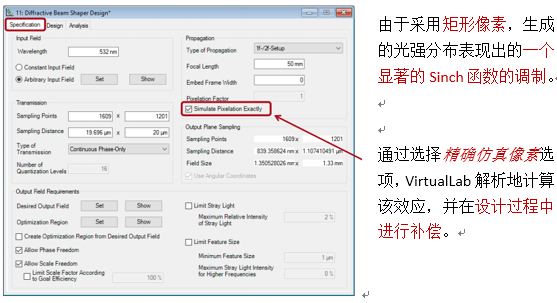
13. D5:IFTA—設(shè)計設(shè)置 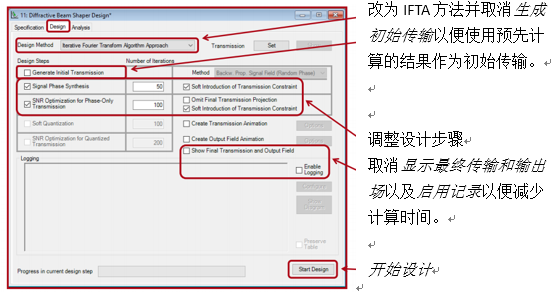
14. IFTA預(yù)分析 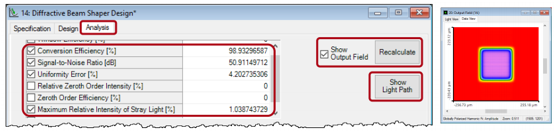
在完成設(shè)計過程,在分析標簽對設(shè)計結(jié)果進行概覽��。 可以顯示輸出場��。如偽(彩虹)彩色��。 由于IFTA在光束整形器設(shè)計中使用更大的場進行計算來制合適的位相值(因此會有更高的采樣)��,使IFTA的分析結(jié)果與后續(xù)整個系統(tǒng)的仿真結(jié)果略有出入����。 15. A1:獲得整個系統(tǒng)—LPD 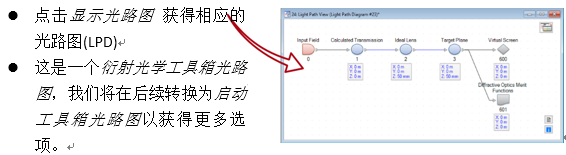
在最初���,IFTA總是輸出一個軸向傳輸系統(tǒng)�����。 因此���,我們將稍微的修改此系統(tǒng)以用于后續(xù)實際幾何結(jié)構(gòu)的最終仿真�。 首先��,我們進行設(shè)計位相傳輸數(shù)據(jù)的最后準備��。 16. A1:應(yīng)用SLM孔徑 現(xiàn)在���,我們需要提取對應(yīng)與實際SLM像素數(shù)的透射區(qū)域�����。 如果在衍射光束整形器會話編輯器窗口中點擊下一步����,該提取將會自動完成����。 然后點擊提取 可以獲得包含指定孔徑的設(shè)計的透射函數(shù)。 17. A1:調(diào)整采樣距離 重新調(diào)整X方向的采樣距離��,這僅在IFTA設(shè)計中需要�。(在整個系統(tǒng)中����,SLM有其原有的采樣尺寸和預(yù)期的傾斜角度。) 可通屬性瀏覽器的數(shù)據(jù)標簽下完成采樣間距的重新調(diào)整�����。 如果整個系統(tǒng)已經(jīng)依據(jù)軸上系統(tǒng)設(shè)計(透射式或者反射式光束分束)�,該操作則沒有必要��。 18. A1:交換透過率函數(shù) 19. A2:轉(zhuǎn)換到基本工具箱LPD 點擊衍射光學(xué)工具箱光路圖的光路編輯器中工具按鈕�����,然后點擊轉(zhuǎn)換為基本工具箱光路圖�。 通過此步驟�,你可以獲得完全的光學(xué)元件選擇樹狀列表以在光路圖中插入元件。 20. A2:調(diào)整實際系統(tǒng)的幾何結(jié)構(gòu) 21. A3 :設(shè)置2f系統(tǒng) 由于理想透鏡元件不適用于離軸非傍軸模擬,因此必須使用下列之一進行更換: 為了考慮相應(yīng)的像差在后面的所用的透鏡��。 如此處所演示—通過一個2f元件��,即實現(xiàn)一個完美無像差的傅里葉透鏡。 如��,該2f系統(tǒng)元件可以完美地將斜光束聚焦到預(yù)期位置的平面顯示屏上���,以補償非傍軸����。編輯對話框中的參數(shù)設(shè)置已經(jīng)考慮了元件前后的傳播距離���。 文件: SLM.0001_TopHat_SLM-Design_5_FinalReflectiveSetup.lpd 22. A3 :選擇旋轉(zhuǎn)算子 23. A4 :模擬像素化透射函數(shù) 在默認設(shè)置下�����,VirtualLab通過單個數(shù)據(jù)點(仿真像素)仿真每一個設(shè)計的透過像素���。 若考慮每一矩形轉(zhuǎn)換像素的效應(yīng),需要用更多的數(shù)據(jù)點來描述像素�����。 根據(jù)引入的像素因子���,我們以3×3數(shù)據(jù)點仿真每個轉(zhuǎn)換像素區(qū)域�。 此時,我們沒考慮SLM像素間隔���。這可以被視為一個特殊的組件��,將在SLM.0002中會介紹�。 上述考慮將會增加計算時間以及輸出場尺寸�����。 24. A5 :完整系統(tǒng)的仿真 操作&重點關(guān)注反射 不同幾何結(jié)構(gòu)�,屏幕&加工 考慮反射 關(guān)于期望設(shè)置的幾何結(jié)構(gòu),當(dāng)設(shè)計這樣一個光束整形元件時,用戶需要考慮如下問題: 結(jié)構(gòu)應(yīng)放在元件的哪一邊��。 系統(tǒng)是透射式還是反射式��。 目標圖案是在透射屏上觀察研究還是在不透明屏幕上���。 | 

至其他版塊")
